Filtro adaptado
0. Introducción
El problema que pretendemos solucionar es la transmisión de una
información mediante unas formas de onda desde el emisor al receptor.
Todas las explicaciones de este documento están referidas a comunicación
en banda base, aunque se podría generalizar a señales moduladas.
Empezaremos utilizando pulsos rectangulares con anchura B (su ancho de
banda) y veremos por qué no nos sirven ese tipo de pulsos, haciendo
sucesivos comentarios acerca de posibles mejoras a lo largo de todo el
canal de comunicación.
1. Interferencia entre símbolos (ISI)
Al emplear pulsos rectangulares en frecuencia, éstos en el tiempo
se traducen en funciones sinc, con pasos por cero cada T=1/2B.
Esta función sinc tiene una serie de lóbulos secundarios
que, si el instante de muestreo no es lo suficientemente perfecto, en esos
casos no sólo se va a detectar la parte de señal correspondiente
al bit o símbolo que nos interesa, sino que también se estará
detectando superpuesto a lo anterior una parte de bit correspondiente a
algún bit o símbolo contíguo (es decir, se produce
ISI). Al final, la conjunción de la ISI, el efecto del ruido
y otras interferencias pueden llevarnos a recibir un símbolo erróneo.
La solución que se plantea para evitar en cierto
modo el problema anterior es la utilización de una señal
cuya respuesta en frecuencia sea el coseno alzado, que en el dominio
del tiempo también tiene pasos por cero cada T, siendo sus lóbulos
secundarios de menor significancia que en el caso de la señal rectangular,
y además presenta pasos por cero intermedios entre cero y cero que
presentaba la señal rectangular. El único problema de la
señal en coseno alzado es que ocupa el doble de ancho de banda (permite
tan solo la mitad del bit rate de los pulsos rectangulares).
2. La familia del coseno alzado
Existe una familia de señales con respuesta frecuencial en coseno
alzado. Cada una de ellas tiene un factor de roll-off diferente,
que va a acondicionar el ancho de banda y la respuesta impulsional. El
factor de roll-off indica el porcentaje de ancho de banda que excede la
señal de la familia del coseno alzado respecto ancho de banda que
ocuparía el pulso rectangular cuya respuesta impulsional presentara
los mismos pasos por cero. De este modo, la señal explicada en el
apartado anterior correspondería a un roll-off del 100%, una señal
con un roll-off del 50% tendría un ancho de banda un 50% más
grande que la rectangular correspondiente y una rectangular pura se correspondería
con un factor de roll-off del 0%. El coseno alzado con roll-off del 100%,
a pesar de ser la de mayor ancho de banda, presenta una gran ventaja en
el dominio del tiempo, ya que además de los pasos de cero que ya
presentaba la rectangular, añade unos nuevos pasos por cero justo
en la mitad de cada intervalo, que son muy prácticos para establecer
sincronismos y generar los relojes en el receptor.
El elegir uno u otro roll-off dependerá de varios factores, como
la disponibilidad de ancho de banda, los niveles de ruido esperados, el
bit rate deseado, etc. Así por ejemplo, el CCITT establece un roll-off
del 75% para el módem V.22 bis, mientras que en algunos sistemas
de radio digital por satélite se usan factores de roll-off del 30%.
Pero esto no es tan fácil y bonito como parece, porque el pulso
recibido va a depender del pulso transmitido, del canal y del receptor,
y las características del canal no se van a poder modificar y además
variarán contínuamente por varias circunstancias.
3. Diagramas de ojo
Son la representación en un osciloscopio de la señal recibida
(en el dominio del tiempo, claro está). En estos diagramas se representan
los intervalos de todos y cada uno de los bits recibidos, y su mayor o
menor claridad en la representación nos dará una idea de
la mejor o peor calidad de la transmisión.
4. Ecualización digital
Si enviamos un único pulso rectangular desde el emisor, cuya
respuesta impulsional es la famosa sinc con sus famosos pasos por cero
cada T, es posible que en recepción esos pasos por cero se hayan
movido un poquillo debido al ruido o a alguna interferencia y en vez de
ser un cero sea un valor próximo a cero pero no nulo. Para
evitar éso se pone en recepción un ecualizador que
fuerce los pasos por cero. Estos filtros consistirán básicamente
en unos coeficientes que serán los correspondientes a las muestras
de la señal con la que convolucionemos la entrada para obtener la
señal deseada. 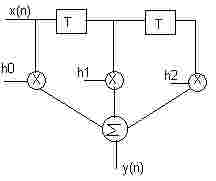 Una
de las ventajas de utilizar un ecualizador digital de este tipo es que
los mencionados coeficientes se pueden adaptar a las características
del canal: si se transmite un pulso "de entrenamiento" conocido
y se muestrea a la salida, a partir de la salida obtenida se pueden obtener
dichos coeficientes. Desafortunadamente las características del
canal suelen fluctuar. Es necesario entonces implementar algún algoritmos
mediante el cual se recalculen dichos coeficientes tras emitir el pulso
"de entrenamiento" de vez en cuando. A esta técnica se
le conoce como ecualización adaptativa. En la figura se observa
la forma que debería tener uno de éstos filtros, siendo los
h0, h1 y h2 sus coeficientes.
Una
de las ventajas de utilizar un ecualizador digital de este tipo es que
los mencionados coeficientes se pueden adaptar a las características
del canal: si se transmite un pulso "de entrenamiento" conocido
y se muestrea a la salida, a partir de la salida obtenida se pueden obtener
dichos coeficientes. Desafortunadamente las características del
canal suelen fluctuar. Es necesario entonces implementar algún algoritmos
mediante el cual se recalculen dichos coeficientes tras emitir el pulso
"de entrenamiento" de vez en cuando. A esta técnica se
le conoce como ecualización adaptativa. En la figura se observa
la forma que debería tener uno de éstos filtros, siendo los
h0, h1 y h2 sus coeficientes.
5. Ortogonalidad
Se dice que dos señales son ortogonales si la integral del producto
de ambas señales (en el dominio del tiempo) es cero, por lo que
también su correlación va a ser cero. De ese modo,
dos pulsos rectangulares en intervalos de tiempo diferentes (por ejemplo
el primero de o a T y el segundo de T a 2T) son ortogonales: su correlación
es nula. Por otro lado la correlación de una señal consigo
misma (autocorrelación) nos va a dar idea de la energía
de esa señal (la autocorrelación es el límite cuando
T tiende a infinito de 1/T de la energía de la señal). Debido
a la ortogonalidad y lo relativo a la energía, si transmitimos una
señal que es superposición de dos señales s1
y s2, ambas ortogonales entre
sí, la energía
de dicha señal (elevando la suma de ambas al cuadrado) va a ser
la suma de las energías de cada una de ellas, ya que al ser ambas
señales ortogonales, las componentes cruzadas se van a eliminar.
6. Detección mediante filtro adaptado
Si origináramos nuestras señales en función de
unos pulsos básicos que fueran ortogonales entre sí, podríamos
realizar la detección de las señales mediante la correlación,
decidiendo qué simbolo se recibe en presencia de ruido. 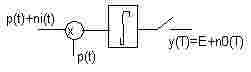 Esto
se consigue símplemente multiplicando la señal recibida
por cada uno de los pulsos básicos y realizando la integral
de eso. Si no existiera ruido el resultado sería cero si dicha señal
coincide con la enviada. En presencia de ruido sin embargo, todas las integrales
van a ser no nulas, aunque sólo una de las integrales tendrá
un valor apreciable, siendo su pulso correspondiente la señal que
estimaremos como la enviada. La contribución del ruido a estas integrales
va a ser prácticamente nula.
Esto
se consigue símplemente multiplicando la señal recibida
por cada uno de los pulsos básicos y realizando la integral
de eso. Si no existiera ruido el resultado sería cero si dicha señal
coincide con la enviada. En presencia de ruido sin embargo, todas las integrales
van a ser no nulas, aunque sólo una de las integrales tendrá
un valor apreciable, siendo su pulso correspondiente la señal que
estimaremos como la enviada. La contribución del ruido a estas integrales
va a ser prácticamente nula.
Este receptor mediante correlación puede ser cambiado por un
proceso de filtrado si conseguimos que la salida de tal filtro ante
un pulso determinado sea igual a la energía del pulso. Si conseguimos
un filtro de estas características que sea lineal, entonces lo podremos
modelar en el dominio del tiempo por su respuesta impulsional o en frecuencia
por su respuesta frecuencial. Para que la convolución del pulso
recibido por el filtro, p(t), con la respuesta impulsional del filtro,
h(t) sea la energía de p(t), h(t) debería ser p(T-t),
( la convolución implica invertir h(t), multiplicar éso por
p(t) e ir desplazando h(-t) en el tiempo). En frecuencia se va a verificar
que el módulo de H y de P son los mismos, y que Arg(H(w)) = -wT
- Arg(P(w)). Por las características del módulo de la respuesta
frecuencial, el filtro suprimirá todas las frecuencias que no estén
presentes en P(w). Por otra parte, de la expresión de la fase se
observa que el filtro tiende a desplazar las fases de las componentes frecuenciales
al instante T, que es precisamente el instante de muestreo. Las componentes
del ruido, si este es aleatorio blanco y gaussiano (AWGN) con media cero,
al tener fases aleatorias, tienden a ser canceladas (además del
ruido que queda fuera de la banda ocupada por H(w)).
Si a la entrada del filtro adaptado tenemos un ruido AWGN de media cero,
el ruido a la salida seguirá siendo gaussiano, aunque ya no será
blanco, y su potencia será EN/2, siendo E la energía del
pulso y N (eta) la densidad espectral de potencia del ruido de entrada.
Al ser el ruido a la salida del filtro gaussiano, la función Q puede
servirnos para determinar la probabilidad de error. En el instante T la
señal deseada es numéricamente igual a E, y la desviacion
estándar del ruido de salida es \/¯EN/2. Por todo ello, la
probabilidad de error es Pe = Q [señal
de pico/2 * desviación estándar ]. Pe=Q[\/¯E/2N].
El significado de esa fórmula es que, si empleamos un filtro
adaptado, para cualquier pulso empleado la probabilidad de error vendrá
determinado únicamente or la energía del pulso y por la densidad
espectral de potencia del ruido. Además, para mejorar la probabilidad
de error no es suficiente con variar la forma del pulso, manteniendo su
energía constante. Deben añadirse mejoras adicionales, como
una aproximación a un detector óptimo o una reduccion de
la ISI. Por el contrario, si la forma del pulso debe ser alterada por alguno
de esos propósitos, el BER no tiene por que verse modificado si
empleamos el mismo detector óptimo y la energía del pulso
es la misma.
Pero aún no ha quedado muy claro de en qué momento del
sistema de comunicaciones debe aparecer el pulso en forma de coseno alzado,
ya que si éste se generara en el emisor, podría llegar distorsionado
en la recepción. Si suponemos un canal ruidoso con ruido blanco
(densidad espectral plana), el espectro de la señal recibida tendrá
la forma GT(f)GR(f).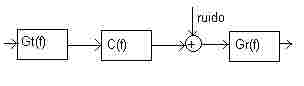 Por
otra parte, si usamos un receptor óptimo, GR(f)
debe estar adaptado al pulso con espectro GT(f),
por lo que |GR(f)|=|GT(f)|.
Por ello, si el espectro del pulso recibido GT(f)GR(f)
debe ser de la forma del coseno alzado, entonces, |GR(f)|=|GT(f)|=\/¯(coseno
alzado). Sin embargo, la respuesta del canal nunca será plana, por
lo que habrá que añadir un ecualizador que deshaga el efecto
de la atenuación del canal para las distintas frecuencias. Por ejemplo,
si el efecto de la atenuación del canal fuera proporcional a la
raíz cuadrada de la frecuencia, añadiríamos un ecualizador
cuya ganancia fuera proporcional a la raíz cuadrada de la frecuencia
también. El problema de realizar éso es que el ecualizador
refuerza las altas componentes frecuenciales del ruido, que pueden enmascarar
a las altas componentes frecuenciales de la señal. Para evitarlo
se ensalzan las altas componentes frecuenciales de la señal transmitida
desde el transmisor (algo similar a las técnicas de pre- y de-énfasis).
Por
otra parte, si usamos un receptor óptimo, GR(f)
debe estar adaptado al pulso con espectro GT(f),
por lo que |GR(f)|=|GT(f)|.
Por ello, si el espectro del pulso recibido GT(f)GR(f)
debe ser de la forma del coseno alzado, entonces, |GR(f)|=|GT(f)|=\/¯(coseno
alzado). Sin embargo, la respuesta del canal nunca será plana, por
lo que habrá que añadir un ecualizador que deshaga el efecto
de la atenuación del canal para las distintas frecuencias. Por ejemplo,
si el efecto de la atenuación del canal fuera proporcional a la
raíz cuadrada de la frecuencia, añadiríamos un ecualizador
cuya ganancia fuera proporcional a la raíz cuadrada de la frecuencia
también. El problema de realizar éso es que el ecualizador
refuerza las altas componentes frecuenciales del ruido, que pueden enmascarar
a las altas componentes frecuenciales de la señal. Para evitarlo
se ensalzan las altas componentes frecuenciales de la señal transmitida
desde el transmisor (algo similar a las técnicas de pre- y de-énfasis).
7. Implementación del filtro adaptado
Las características del filtro adaptado han surgido bajo la suposición
de que la ISI es despreciable. Hemos visto también que los pulsos
en coseno alzado cumplen ese criterio. Ya que el espectro frecuencial de
esos pulsos es real, tanto el transmisor como el receptor deben tener una
respuesta en fase lineal. Para implementar nuestro filtro podríamos
elegir cualquiera de los tipos existentes (FIR, IIR o analógicos).
Sin embargo los IIR muestran unos retrasos no lineales a lo largo de la
banda frecuencial que nos conducirían a tener ISI. Por otra parte,
si bien con los analógicos sucede lo mismo, éstos pueden
ser complementados con un ecualizador que cancele la no linealidad de dichos
retardos. Como todo en el mundo tiende a la digitalización, dejaremos
a un lado los filtros analógicos y emplearemos los filtros FIR
digitales, ya que son además los que mejor se adecúan a nuestros
requisitos, ya que los FIR con coeficientes simétricos cumplen bien
los requerimientos de fase lineal y los retardos no constituyen un problema.
8. Ptolemy y sus filtros y pulsos adaptados.
Dentro del dominio SDF hay una galaxia denominada Signal processing
que incluye numerosos filtros (FIR, IIR y de otros tipos que yo de
momento desconozco), ademas de algunas operaciones como la convolucion
y el desplazamiento de fases. Ademas hay una serie de estrellas agrupadas
bajo el nombre de Filtros adaptativos que creo que nos pueden ser
de gran utilidad para simular nuestro modem. Ademas, en el Ptolemy del
bips78 hay alguna estrella nueva, como la del coseno alzado. Voy a intenar
explicar las estrellas mas utiles:
FIR: Los coeficientes del FIR se determinan en el parametro taps.
Los parametros por defecto constituyen un filtro paso-bajo de orden 8 y
con fase lineal. Ademas dichos coeficientes se pueden sacar de un fichero.
Esta estrella permite ademas la simulacion de sitemas multirate y para
ello añade parametros como los factores de interpolacion y de diezmado.
Ademas de esta estrella Ptolemy tambien dispone de las estrellas FIRCx
y FIRFix, teniendo estos coeficientes complejos o de punto fijo.
Coseno alzado: Es un filtro FIR con una respuesta frecuencial en coseno
alzado. Esta estrella tambien se encuentra en la galaxia Communications,
ademas de un filtro en coseno alzado para entradas complejas.
LMS: Es un filtro adaptativo que utiliza el algoritmo de adaptacion
del menor error cuadratico (no se muy bien como se traduce Least-Mean Square).
Sus parametros vuelven a ser los parametros del filtro y por defecto son
los de un paso bajo de orden 8. Esta estrella es una derivada de la estrella
FIR, pero no soporta interpolacion (aunque si diezmado). Para utilizar
esta estrella habria que comparar la salida del filtro con una señal
de referencia para producir una señal de error. La señal
de error la realimentariamos a la entrada. Uno de los parametros que hay
que introducir es el retraso entre la salida del filtro y la entrada de
errores. El numero de retrasos debe ser mayor que cero para que no se produzcan
deadlocks. Ademas de esta estrella hay otras como LMSCx, LMSCxTKPLOT, etc,
que permiten trabajar con complejos, representar los coeficientes del filtro
y disponer de controles asociados, etc.
Ademas de estas estrellas, tenemos otras que podrian ser de interes,
como BlockFIR, que permite recalcular los coeficientes de un fir
periodicamente con alguna informacion exterior.
Dentro de la galaxia Communications tenemos una serie de estrellas
para modelar diferentes canales: Canales con AWGN, canales ruidosos, canales
con offset de fase, canales con distorsion no lineal y canales telefonicos.
(Estas estrellas tambien se encuentran en la galaxia Telecommunications).
En una de las demos, dentro de l apartado de Signal processing hay
una demo bastante interesante que se puede parecer a lo que tengamos que
hacer, ya que simula un filtro adaptado: utiliza una señal gaussiana
que introduce a un FIR y a un LMS, haciendo la comparacion entre ambas.